[software]
Skarv Software
The Skarv software ecosystem provides tools for processing and managing marine data. It includes tools for underwater 2D and 3D imaging, object detection-segmentation and classification, acoustic data analysis, image enhancement, and surveillance functions such as change detection and object tracking.
Seabed Optics
Process optical images and video to extract features and information
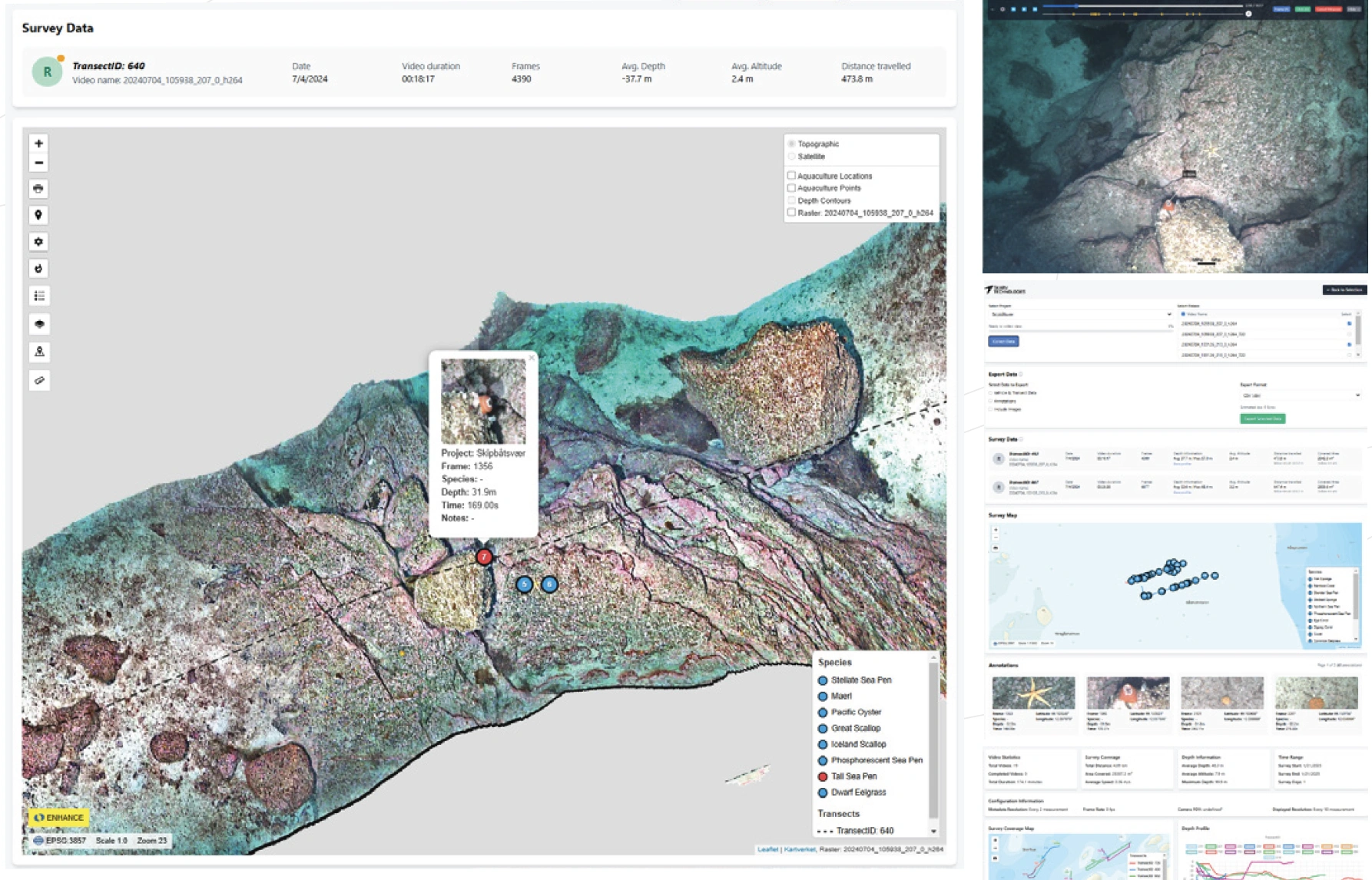
Identification Toolbox
Inspect and annotate video and acoustic data
Image Enhancement
Process images and video to improve color and details
Acoustic Toolbox
Inspect and visualize acoustic imaging data
Unlock the full potential of subsea data
Skarv’s software ecosystem for underwater autonomy and marine robotics enables high-throughput, real-time processing, analytics, and visualization across optical, acoustic, and time-series data - turning raw sensor inputs into actionable insights.
Machine Vision & Intelligence
Real-time object detection, segmentation, and classification using deep learning models.
2D/3D Imaging
Structure-from-motion photogrammetry for 3D scene reconstruction and orthomosaic generation with georeferencing.
Underwater Image Enhancement
Algorithms for de-hazing, backscatter reduction and visual clarity improvement.
Hyperspectral Imaging
Processing pipelines for classification and feature extraction from underwater hyperspectral datasets.
Acoustic Data Analysis
Interpretation of side scan sonar, multibeam, and acoustic backscatter data for coverage mapping and feature identification.
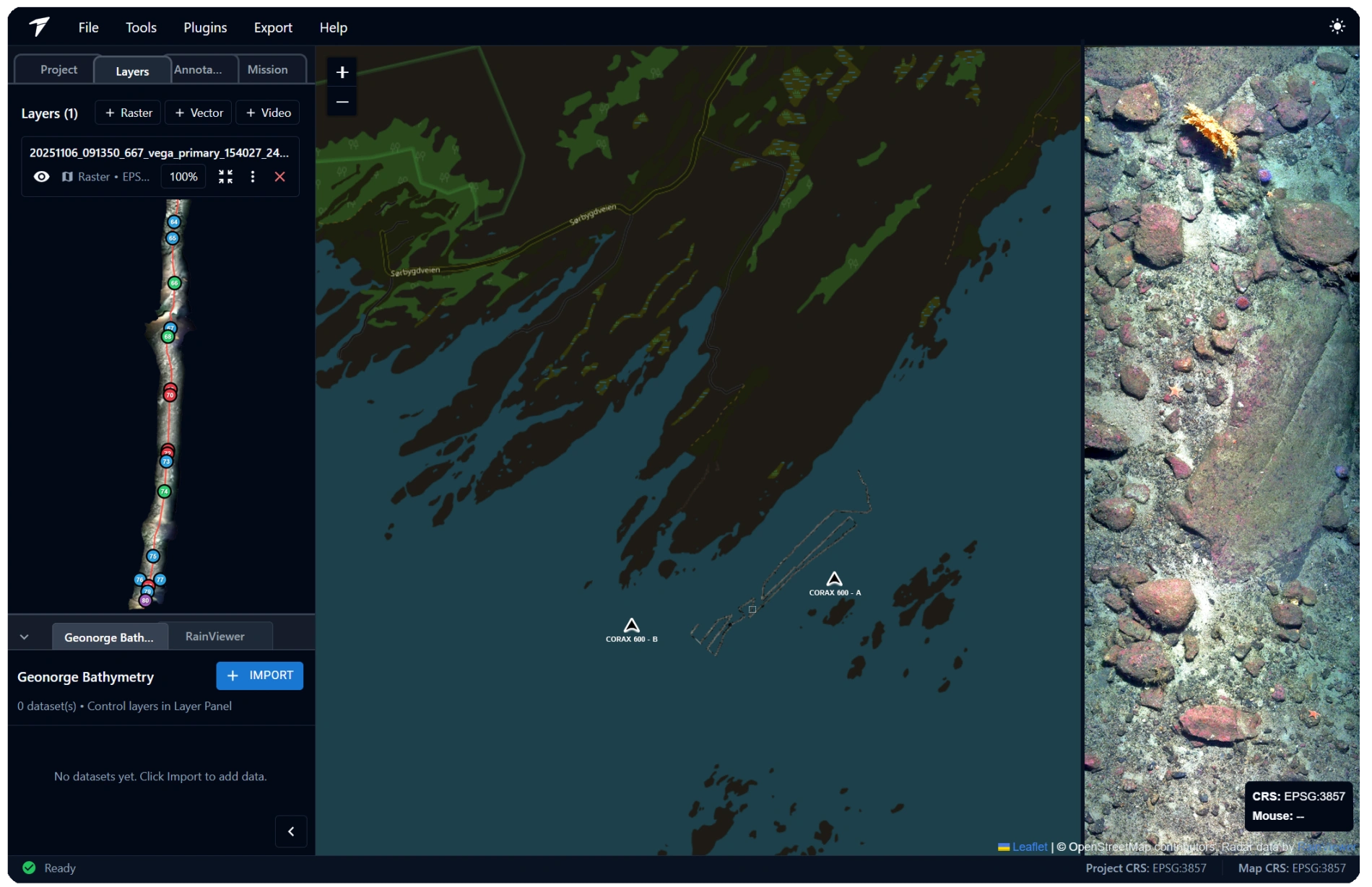
Skarv Identification Toolbox
To support exploration, validation, aand reporting, we provide web-based visualization portals that allow users to interactively explore, query, and share complex complex geospatial datasets. Our tools are built to handle large and heterogeneous data formats such as:
▌ Real-time telemetry and timeseries data
▌ GIS datasets and georeferenced imagery
▌ Video, stills, and acoustically derived image products
▌ 3D point clouds and digital terrain models
Neptus
Neptus is a modular, open-source command-and-control framework developed by the LSTS group for planning, monitoring, and analyzing autonomous vehicle missions. It supports AUVs, ASVs, UAVs, and hybrid systems using the IMC (Inter-Module Communication) protocol. Skarv Technologies is a proud contributor to the project and provides modules for the Neptus software to interface with Skarv's systems.

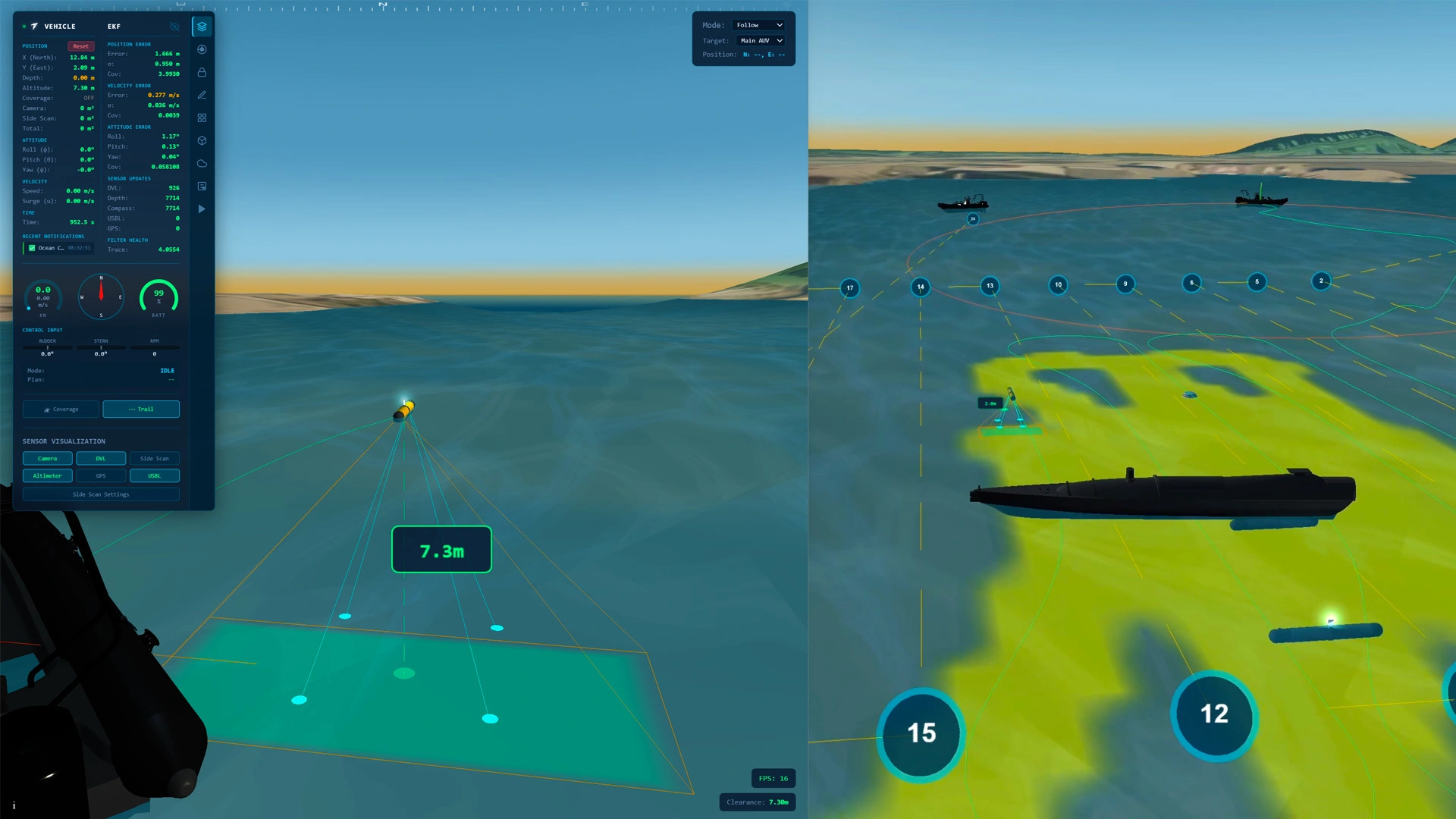
Skarv Simulation Toolbox
The Skarv Simulation Toolbox is a suite of tools for simulating marine operations with autonomous vehicle systems. It includes a physics-based simulator for the CORAX AUV, as well as simulation of other vehicles and sensors. The toolbox is designed to be used in conjunction with the Neptus software for planning and executing missions. This allows for training of operators and development of mission plans before the actual mission is executed, and learn about common failure modes and how to mitigate them. The toolbox uses real bathymetric data and maps from Geoportal Norway.